
Mga produkto


suspensyon Jib Cranes Manipulator
Maikling Paglalarawan:
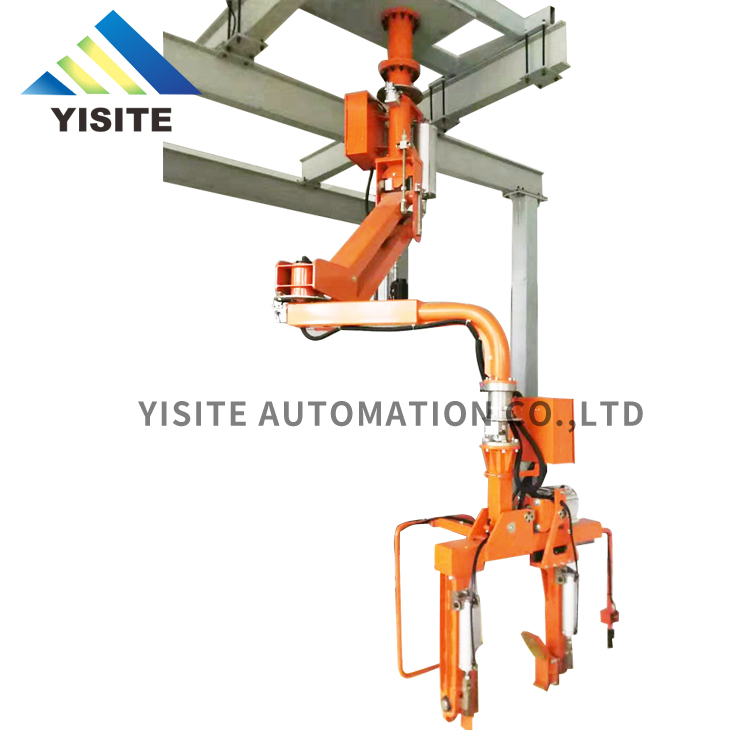
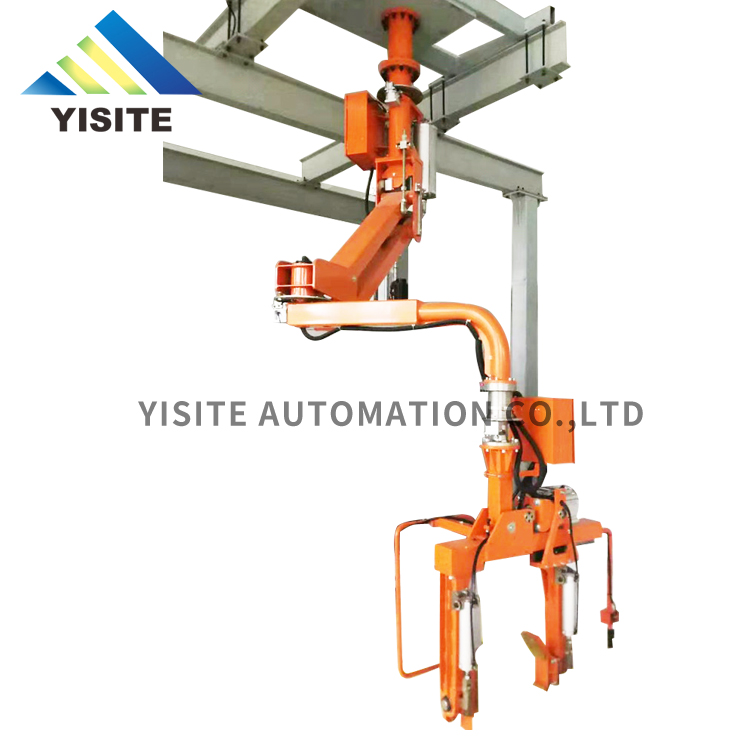
Ang suspension booster manipulator ay binubuo ng installation base, host at steel arm rod, fixture. Ang pangunahing braso ay maaaring paikutin ng 360 degrees, ang pangalawang arm rod ay maaaring paikutin ng 270 degrees upang makamit ang working range ng coverage, at ang pag-ikot ay maaaring magdagdag ng mekanismo ng preno. Ito ay angkop para sa high-frequency handling, positioning, component assembly at iba pang okasyon.



tungkol sa amin

Kami ay isang propesyonal na customized automation equipment manufacturer. Kasama sa aming mga produkto ang depalletizer, pick and place packing machine, palletizer, robot integration application, loading at unloading manipulators, carton forming, carton sealing, pallet dispensper, wrapping machine at iba pang automation solution para sa back-end na linya ng produksyon ng packaging.
Ang lugar ng aming pabrika ay humigit-kumulang 3,500 metro kuwadrado. Ang pangunahing technical team ay may average na 5-10 taon ng karanasan sa mechanical automation, kabilang ang 2 mechanical design engineer. 1 programming engineer, 8 assembly workers, 4 after-sales debugging person, at iba pang 10 manggagawa
Ang aming prinsipyo ay "una sa customer, una sa kalidad, una sa reputasyon", palagi naming tinutulungan ang aming mga customer na "pataasin ang kapasidad ng produksyon, bawasan ang mga gastos, at pagbutihin ang kalidad" na sinisikap naming maging isang nangungunang supplier sa industriya ng automation ng makinarya.
Mga katangian ng produkto
Sa pamamagitan ng pag-detect ng suction cup o sa dulo ng manipulator at pagbabalanse ng gas pressure sa cylinder, maaari nitong awtomatikong matukoy ang load sa mechanical arm, at awtomatikong ayusin ang air pressure sa cylinder sa pamamagitan ng pneumatic logic control circuit, upang makamit ang layunin ng awtomatikong balanse.Kapag ito ay gumagana, ang mga mabibigat na bagay ay parang nasuspinde sa hangin, na maaaring maiwasan ang banggaan ng pag-dock ng produkto. posisyon, at ang tao mismo ay madaling gumana. Kasabay nito, ang pneumatic circuit ay mayroon ding chain protection function tulad ng pagpigil sa aksidenteng pagkawala ng object at pressure loss protection

Ang prinsipyo ng pagtatrabaho at mode ng suspension power manipulator:
Sa pamamagitan ng pag-detect ng suction cup o sa dulo ng manipulator at pagbabalanse ng gas pressure sa cylinder, maaari nitong awtomatikong matukoy ang load sa mechanical arm, at awtomatikong ayusin ang air pressure sa cylinder sa pamamagitan ng pneumatic logic control circuit, upang makamit ang layunin ng awtomatikong balanse.Kapag nagtatrabaho, ang mga mabibigat na bagay ay parang sinuspinde sa hangin, na maaaring makaiwas sa banggaan ng docking ng produkto. Sa loob ng working range ng mekanikal na braso, madaling ilipat ito ng operator pabalik, pakaliwa at pababa sa anumang posisyon , at ang tao mismo ay madaling gumana. Kasabay nito, ang pneumatic circuit ay mayroon ding chain protection function tulad ng pagpigil sa aksidenteng pagkawala ng object at pressure loss protection
Mga tampok
Max payload. 900 Kg
Max Action radius: 4500 mm
Patayong Paglalakbay: 0.5m/min
Sistema ng kontrol: 2200 mm
Sistema ng kontrol: hangin na ganap na niyumatik
Supply: compressed air (40 µm), walang grasa
Presyon sa pagtatrabaho: 0.7 ÷ 0.8 Mpa
Temperatura ng pagtatrabaho: +0° hanggang +45° C
ingay:pagkonsumo ng hangin: 100 Nl ÷ 400 N bawat cycle
Pag-ikot: Column shaft at fixture shaft 360° tuloy-tuloy na pag-ikot, gitnang shaft 300° tuloy-tuloy na pag-ikot







