
Ang power-assisted manipulator ay tinatawag ding pneumatic balance na power-assisted manipulator, isang pneumatic balance crane, at isang balance booster. Ito ay isang nobelang power-assisted device na ginagamit para sa labor-saving operations sa panahon ng paghawak at pag-install ng materyal. Ito ay isang pneumatically assisted, manually operated manipulator. Ang paggamit ng power-assisted manipulators ay maaaring mabawasan ang labor intensity ng mga operator, makamit ang magaan na operasyon at tumpak na pagpoposisyon kapag humahawak ng mabibigat na workpiece, at matiyak ang kaligtasan ng mga kagamitan at operator. Ang power-assisted manipulator ay pangunahing ginagamit upang tulungan ang mga manggagawa sa paghawak at pag-assemble, at ito ay isang power-assisted handling equipment na nagpapababa ng labor intensity. Pinagsasama nito ang mga prinsipyong ergonomic at nagbibigay ng materyal na transportasyon, paghawak ng workpiece at pagpupulong na may mga konsepto ng kaligtasan, pagiging simple, kahusayan at pagtitipid ng enerhiya. Sa panahon ng proseso ng transportasyon, ang kagamitan ay kinokontrol ng isang lohikal na air circuit, na nagpapalit ng bigat ng mabibigat na bagay mismo sa isang maliit na manu-manong puwersa ng pagpapatakbo, na madaling napagtanto ang paggalaw, transportasyon at pagpupulong ng mga mabibigat na bagay sa anumang posisyon sa operating space, at paglutas ng problema sa transportasyon at pagpupulong pang-industriya nang ligtas at mahusay. Ang mga hindi karaniwang naka-customize na fixture ay maaaring kumpletuhin ang mga pagkilos gaya ng pag-agaw, pagdadala, pag-flip, pag-angat, at pag-dock ng mga workpiece (mga produkto), at mabilis at tumpak na mag-assemble ng mga mabibigat na bagay sa mga preset na posisyon. Ang mga ito ay mainam para sa paglo-load at pagbabawas ng mga materyales at pagpupulong ng produksyon. Ang power-assisted equipment ay maaaring makatipid sa paggawa at mapabuti ang kahusayan para sa pabrika.
Ang hard-arm power-assisted manipulator ay binubuo ng isang balancing host, isang grabbing fixture, at isang installation structure. Maaari itong balansehin ang iba't ibang mga timbang mula 20 hanggang 300kg at angkop para sa mga operasyon ng paglipat ng materyal. Ang mga katangian ng buong balanse at makinis na paggalaw ay nagbibigay-daan sa operator na madaling magsagawa ng paghawak, pagpoposisyon, pag-assemble at iba pang mga operasyon ng workpiece. Ito ay may mataas na katatagan, simpleng operasyon, mataas na kahusayan, mataas na pagganap ng kaligtasan, at nilagyan ng gas cutoff protection device. Ang mga pangunahing bahagi ay gawa sa lahat ng mga kilalang tatak sa buong mundo, at ang kalidad ay ginagarantiyahan. Ito ay may ganap na suspension function at madaling patakbuhin; ginawa ayon sa mga prinsipyo ng ergonomic, ito ay komportable at maginhawa upang gumana; ang istrukturang disenyo ay modular at ang air circuit control ay isinama; ang mga gastos sa paggawa ay nababawasan ng 50%, ang lakas ng paggawa ay nabawasan ng 85%, at ang kahusayan sa produksyon ay nadagdagan ng 50%; ayon sa load at stroke, sila ay na-customize at dumating sa iba't ibang anyo upang matugunan ang iba't ibang mga pangangailangan. Saklaw ng aplikasyon ng power-assisted manipulators: malawakang ginagamit sa warehouse loading at unloading sa automotive industry, chemical industry, product packaging, electrical appliance industry, ceramic sanitary ware industry, building materials at furniture industry, metal parts, machinery manufacturing and processing, paulit-ulit na high-frequency handling work, natural gas at petroleum energy Industry, bagong energy battery, automated logistics at iba pang industriya, na nilagyan ng iba't ibang grippers, maaari nitong mapagtanto ang paghawak at palletizing ng mga produkto ng iba't ibang hugis sa iba't ibang industriya.
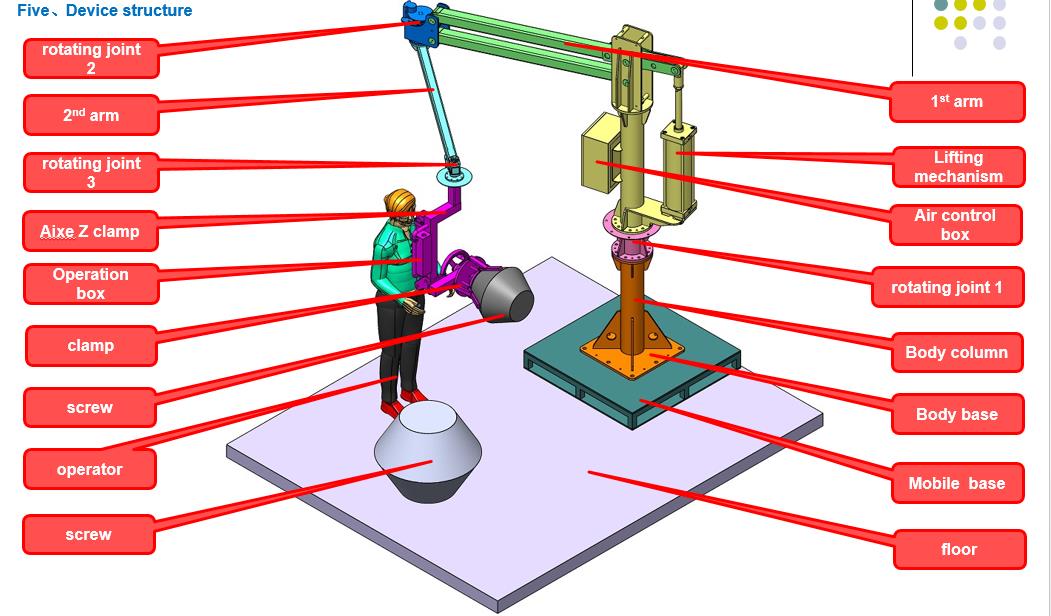
Ang power-assisted manipulator device na ito ay binubuo ng fixed base, body column, joint cantilever, lifting mechanism, Z-axis clamp, operating handle at iba pang mekanikal na bahagi. Inililipat ng operator ang power-assisted manipulator sa graphite electrode. Inilipat ng operator ang power-assisted manipulator clamp sa lupa upang kunin ang graphite electrode screw. Pagkatapos ng grabbing, ito ay dinadala sa graphite electrode thread port, naka-over 90 degrees, at hinihigpitan ng staff ang mga screw thread para sa assembly. Kung ikukumpara sa manu-manong paghawak, ang kagamitang ito ay may mas magaan na puwersa sa pagpapatakbo, mas mabilis na bilis ng pagpapatakbo, simpleng istraktura, mababang rate ng pagkabigo, madaling pagpapanatili, at mababang gastos sa pagpapanatili. Inilalapat nito ang prinsipyo ng balanse ng puwersa upang payagan ang operator na itulak at hilahin ang mga mabibigat na bagay. Maaari itong ilipat at iposisyon nang balanse sa kaukulang espasyo, lalo na angkop para sa paghawak at pag-pallet ng mga workpiece na may tumpak na pagpoposisyon o mga kinakailangan sa pagpupulong. Ginagamit ang mga ito ng iba't ibang industriya upang mabawasan ang mga pinsala at pagkapagod sa likod ng operator, habang pinapabuti ang kahusayan at kalidad ng produksyon. Ang mga manipulator at accessories ay pasadyang idinisenyo at ginawa.
Ang katawan ng manipulator ay gawa sa mga profile ng carbon steel. Ang ibabaw ay electrostatically powder-sprayed at inihurnong sa mataas na temperatura. Ito ay mas environment friendly, maganda at corrosion-resistant kaysa spray painting. Ang control system ay gumagamit ng isang button mechanical valve + shift switch combination, na madaling patakbuhin at matatag sa paghawak. Ang contact surface sa produkto ay gawa sa Non-metallic material para protektahan ang produkto.
Gumagamit ang operator ng forklift para itulak ang power-assisted manipulator sa graphite electrode assembly area para sa fixation, ginagalaw ang power-assisted manipulator clamp sa itaas ng screw sa lupa, ibinababa ang clamp, kinokontrol ang manipulator para i-clamp ang screw sa pamamagitan ng mga button, dinadala ito sa gilid ng sinulid na butas ng graphite electrode, i-flip ang clamp, Ihanay ang elektrod at ipasok ito, pagkatapos ay manu-manong iikot ng operator ang gripper clamp upang i-lock ang turnilyo gamit ang graphite electrode. Pagkatapos i-lock, buksan ang clamp sa pamamagitan ng pindutan upang maluwag ang tornilyo, ilipat ang clamp sa lupa sa itaas ng turnilyo muli, i-flip ang clamp upang piliin ang turnilyo, at pagkatapos ay lumipat sa susunod na graphite electrode upang simulan ang pag-lock ng assembly...
Oras ng post: Okt-11-2023




{kind=link}