
Ang gantry robot ay binubuo ng isang column frame, X-axis component, Y-axis component, Z-axis component, fixture at control box.
Ito ay isang ganap na awtomatikong kagamitang pang-industriya batay sa hugis-parihaba na X, Y, Z na tatlong-dimensional na sistema ng coordinate, na maaaring ayusin ang posisyon ng workpiece o mapagtanto ang paggalaw ng trajectory ng workpiece. Ang control core nito ay ipinatupad sa pamamagitan ng mga pang-industriyang controller.
Sinusuri at pinoproseso ng controller ang iba't ibang input signal, gumagawa ng mga lohikal na paghuhusga, pagkatapos ay naglalabas ng execution command sa bawat output component para makumpleto ang joint motion sa pagitan ng X, Y, at Z axes at magkaroon ng kumpletong hanay ng mga ganap na awtomatikong proseso ng operasyon.
Ginagamit ito sa pag-assemble at transportasyon ng produkto, conveyor system, at unmanned work site. Maaari itong magamit bilang isang mahalagang peripheral na kagamitan para sa pansamantalang imbakan at logistik at maaaring madaling itugma sa kagamitan ng host para sa madaling paggamit. Mga Industriya ng Application na kasangkot sa : panghuling pagpupulong, sub-assembly, pagproseso, pagsubok, pag-debug at transportasyon ng mga produkto at iba pa.
Ang mga tampok ng produkto ay upang matulungan ang mga customer na malutas ang mga problema ng mababang kahusayan o mataas na mga panganib sa paghawak sa iba't ibang uri ng paghawak ng materyal, upang maginhawa at mabilis na mabawasan ang mga panganib sa paghawak, makatipid ng oras, pagsisikap, makatipid sa paggawa at maging mapalitan ang paggawa.
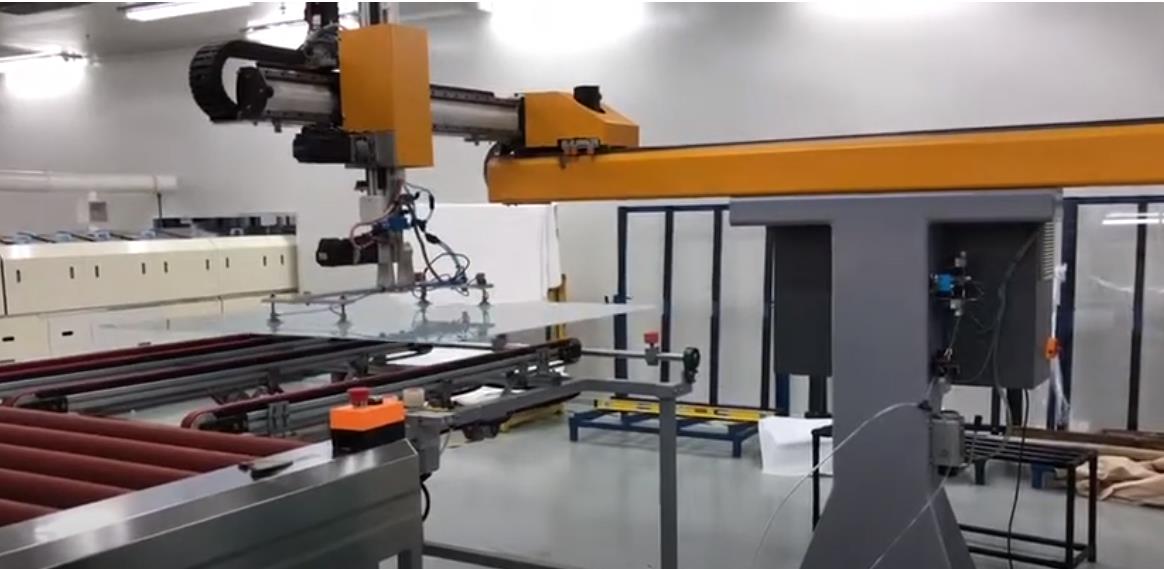
 Ang gantry truss manipulator handling device na ito para sa salamin ay may kasamang mga column at cross beam na naka-install sa mga column. Ang mga cross beam ay naka-install na may mga slide rail. Ang mga slide rail ay naka-install na may isang transverse sliding device. Naka-install ang transverse sliding device na may vertical sliding device at pneumatic suction cup device. Ito ay maisasakatuparan Ang mekanismo ng transportasyon ay gumagalaw sa isang nakapirming punto sa three-dimensional na espasyo, sinisipsip ang salamin sa pamamagitan ng suction cup, Una lumipat sa gilid ng X-axis, pagkatapos ay i-flip 90 degrees sa itinalagang posisyon, at pagkatapos ay umakyat pataas at pababa sa Y-axis. Matapos maabot ang nakatakdang posisyon, bitawan ang baso at ilagay ito sa istante ng salamin. Ang katatagan ng istruktura ng buong aparato ay napakataas, na lubos na nagpapabuti sa paghawak. kahusayan.
Ang gantry truss manipulator handling device na ito para sa salamin ay may kasamang mga column at cross beam na naka-install sa mga column. Ang mga cross beam ay naka-install na may mga slide rail. Ang mga slide rail ay naka-install na may isang transverse sliding device. Naka-install ang transverse sliding device na may vertical sliding device at pneumatic suction cup device. Ito ay maisasakatuparan Ang mekanismo ng transportasyon ay gumagalaw sa isang nakapirming punto sa three-dimensional na espasyo, sinisipsip ang salamin sa pamamagitan ng suction cup, Una lumipat sa gilid ng X-axis, pagkatapos ay i-flip 90 degrees sa itinalagang posisyon, at pagkatapos ay umakyat pataas at pababa sa Y-axis. Matapos maabot ang nakatakdang posisyon, bitawan ang baso at ilagay ito sa istante ng salamin. Ang katatagan ng istruktura ng buong aparato ay napakataas, na lubos na nagpapabuti sa paghawak. kahusayan.

Oras ng post: Mar-18-2024



